8.4 電極固定と電極移動方式の比較
 アーク現象の観察において、トーチとカメラとを固定し、母材を移動させて現象を観察する手法を採用するのが一般的でした。カメラと母材を固定して、トーチを移動させる方法は、溶接速度などによってはカメラの前を一瞬で通り過ぎてしまい、必要な映像が撮影できないことが多いからです。トーチ固定の場合には図に示すように、複数のカメラを用いて同時に撮影することで、立体的な挙動の観察が可能となります。
アーク現象の観察において、トーチとカメラとを固定し、母材を移動させて現象を観察する手法を採用するのが一般的でした。カメラと母材を固定して、トーチを移動させる方法は、溶接速度などによってはカメラの前を一瞬で通り過ぎてしまい、必要な映像が撮影できないことが多いからです。トーチ固定の場合には図に示すように、複数のカメラを用いて同時に撮影することで、立体的な挙動の観察が可能となります。
溶接線上にカメラを設置して前方もしくは後方からの挙動を撮影する場合には、トーチとカメラとが相対的に移動する時に特定の範囲内でしかピントが合わないという問題も生じます。横方向からの撮影では、最近のカメラ性能の向上を受けて、高精細化が進み大きな画面での撮影が可能となっていますので、条件によってはトーチ移動の撮影でも必要なデータ取得が可能です。
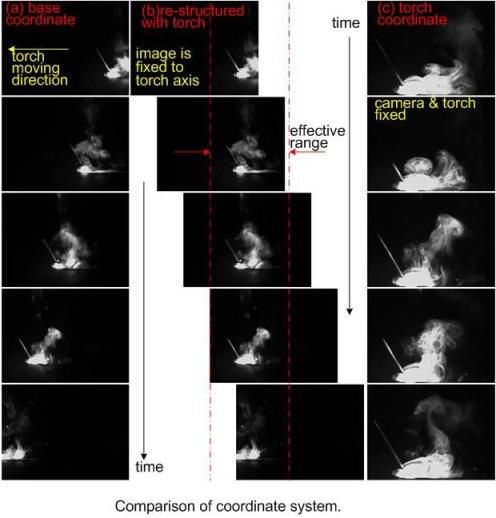
下の連続写真は、トーチ移動とトーチ固定の比較写真です。トーチ移動の場合には、比較的広い範囲を撮影するために全体的な視野を広げ、結果的に撮影したい対象は小さくなります。対象がカメラの視野内に完全に収まっていなければ解析に利用できませんから、上下端の映像は利用できず、その中の映像しか解析に利用できません。
一方、トーチ固定の場合には、視野を撮影目的に適した範囲に狭めることができ、結果的に高精細な映像を長時間連続して撮影することが可能となります。
右画像は、 上に示したホットワイヤとレーザとのハイブリッド溶接の映像です。撮影速度は毎秒200コマで、980nm近辺の近赤外領域のみを白黒で撮影した画像(熱画像)の高輝度部分を擬似カラー表示し、見たい現象を直感的に理解しやすく編集しています。実際の映像はもっと広い領域を撮影しています。この映像では関係ある範囲のみを切り出し、カメラ固定の映像をそのまま表示しています。レーザ位置固定で、レーザにより発生するプルームなどの挙動を詳細に検討したい場合には、移動速度を加味して各時刻毎に切り出す領域を変えることにより、レーザ固定の映像を再生表示できます。
上に示したホットワイヤとレーザとのハイブリッド溶接の映像です。撮影速度は毎秒200コマで、980nm近辺の近赤外領域のみを白黒で撮影した画像(熱画像)の高輝度部分を擬似カラー表示し、見たい現象を直感的に理解しやすく編集しています。実際の映像はもっと広い領域を撮影しています。この映像では関係ある範囲のみを切り出し、カメラ固定の映像をそのまま表示しています。レーザ位置固定で、レーザにより発生するプルームなどの挙動を詳細に検討したい場合には、移動速度を加味して各時刻毎に切り出す領域を変えることにより、レーザ固定の映像を再生表示できます。

最近のロボット利用技術の着実な進展により、複数のロボットを同期させて運動させることは簡単になっています。溶接もロボットを用いて行うことが一般的ですから、横方向からの撮影の場合には溶接に使うのとは別のロボットハンドに高速度カメラを固定し、溶接の進行とともにカメラの視野も移動させることが容易になっています。右図に、固定式の高速度カメラと、ロボットアームに装着して、溶接部と連動して移動する高速度カメラを用いて、撮影を実施している場合の一例を示します。
 溶接現象を明確に理解するためには、取得した映像の各画素の位置と、実際に現象が生じている観察対象の位置情報が一致しなければなりません。そのために、右図のような校正チャートを用います。碁盤状に線を引いたチャートでは、線の太さの問題があり、なかなか正確な校正を行えません。個々の面積と大きさが正確に描写された、白黒の市松模様であれば、輝度が過剰もしくは不足の場合にも、白と黒の境界を正確に同定することが可能となります。複数のカメラの校正を行うときのために、中心部に特異点を設置して、相互のカメラ映像の位置決めを容易にします。ただし、この方法では、参照する四角い領域が画素に比べて相当大きくなるために、位置精度を十分高くすることは困難です。
溶接現象を明確に理解するためには、取得した映像の各画素の位置と、実際に現象が生じている観察対象の位置情報が一致しなければなりません。そのために、右図のような校正チャートを用います。碁盤状に線を引いたチャートでは、線の太さの問題があり、なかなか正確な校正を行えません。個々の面積と大きさが正確に描写された、白黒の市松模様であれば、輝度が過剰もしくは不足の場合にも、白と黒の境界を正確に同定することが可能となります。複数のカメラの校正を行うときのために、中心部に特異点を設置して、相互のカメラ映像の位置決めを容易にします。ただし、この方法では、参照する四角い領域が画素に比べて相当大きくなるために、位置精度を十分高くすることは困難です。
 高速度ビデオカメラの位置情報を正確に校正するための、手法について説明します。まず、市松模様のチャートを30度程度回転して設置します。次に、市松模様のチャートを載せた駆動台を一定速度で移動させます。移動しているチャートを高速度ビデオカメラで連続的に撮影します。この連続映像から、駆動台の移動速度と撮影速度とを齟齬無く決定すれば、各画素と境界線の位置情報とを対比させることにより、画素単位の正確な位置情報が求まります。実際の物理的な位置情報と各画素の対応を行列形式のデータで与えておけば、撮影結果から簡単に実位置を示すことができます。
高速度ビデオカメラの位置情報を正確に校正するための、手法について説明します。まず、市松模様のチャートを30度程度回転して設置します。次に、市松模様のチャートを載せた駆動台を一定速度で移動させます。移動しているチャートを高速度ビデオカメラで連続的に撮影します。この連続映像から、駆動台の移動速度と撮影速度とを齟齬無く決定すれば、各画素と境界線の位置情報とを対比させることにより、画素単位の正確な位置情報が求まります。実際の物理的な位置情報と各画素の対応を行列形式のデータで与えておけば、撮影結果から簡単に実位置を示すことができます。
次ページ 2014.10.10作成 2017.1.26改定